{kind=link}
Federico Iuricich
Kenneth Weiss
Develop scalable data representations for big geospatial data.
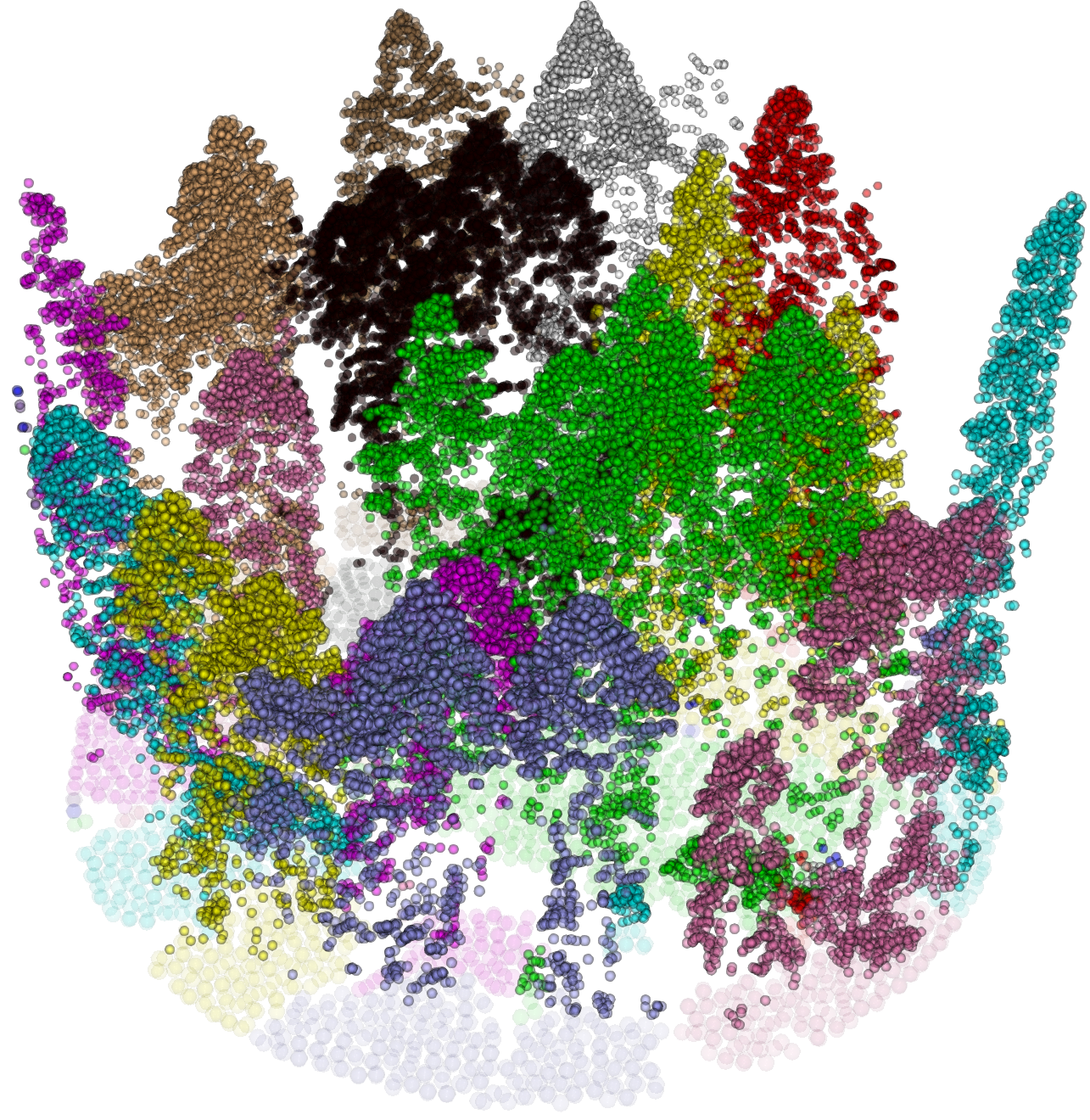
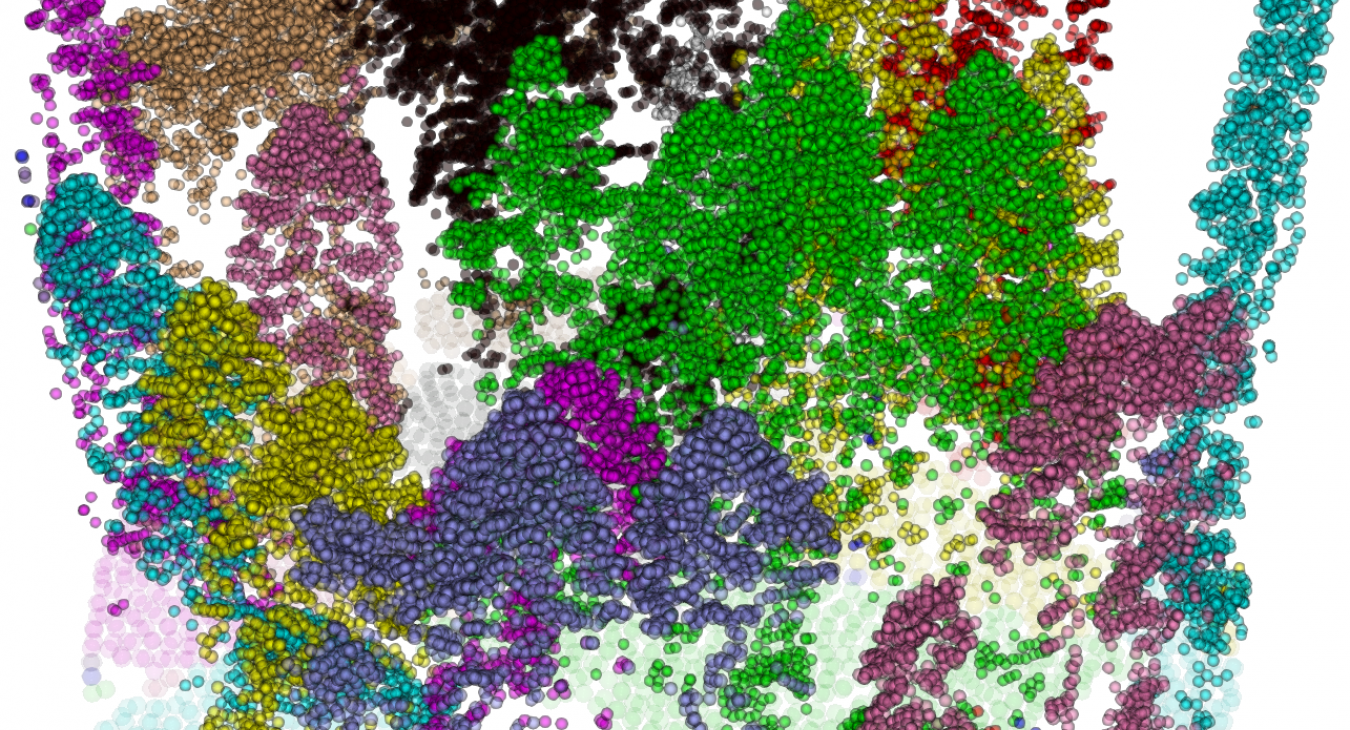
The project focuses on developing scalable data representations, and algorithms for processing and analyzing scattered big geospatial data. The emphasis is on dealing with point clouds of very large size, arising from LIDAR acquisitions, and on applications to terrain modeling and to tree reconstruction from forestry data, with benefits to the research in environmental and Earth science. Being the approach entirely data agnostic, the project has a potential impact on a broader range of applications, including neuroscience, social science, and virtual reality. Software tools for modeling and analysis of very large terrains, and for forestry segmentation will be developed and distributed in the public domain.
The fundamental research tasks identified in this project are:
-
Task 1. Develop a new decomposition-based model for data structures for simplicial complexes (meshes in two, three and higher dimension complexes), as well as a dimension-independent implementation.
-
Task 2. Develop a new framework for processing and analysis of terrains reconstructed from large LIDAR point clouds, based on the new data model, and on topological data analysis algorithms.
-
Task 3. Develop a new framework for the representation and analysis of 3D shapes for applications to tree identification and reconstruction from LiDAR point clouds based on topological algorithms and on a data structure rooted in the new decomposition-based model.